


































7月28日,博雅工道团队与南网储能公司储能科研院在惠蓄电站进行了“深水、动水、浑水等复杂环境长隧洞水下机器人应用关键技术研究及装备研制项目”的验收工作。经过一系列测试,机器人系统成功通过了耐水压、水下运动、声学光学检测等验收环节。

项目背景
长隧洞水下检测一直以来都是一个难题。引水隧洞长时间受到水流冲刷,容易出现掉块、露筋、裂缝和冲蚀等混凝土缺陷,这些问题无疑会对水电站系统的安全性产生影响。
由于长距离输水隧洞检修通道布置受限,不宜派遣潜水员进行水下检测,而多采用放空检查的方式,但放空检查不仅会影响工程效益,有时还会危及隧洞结构的安全,有些隧洞不得不放弃这一部分的检查。
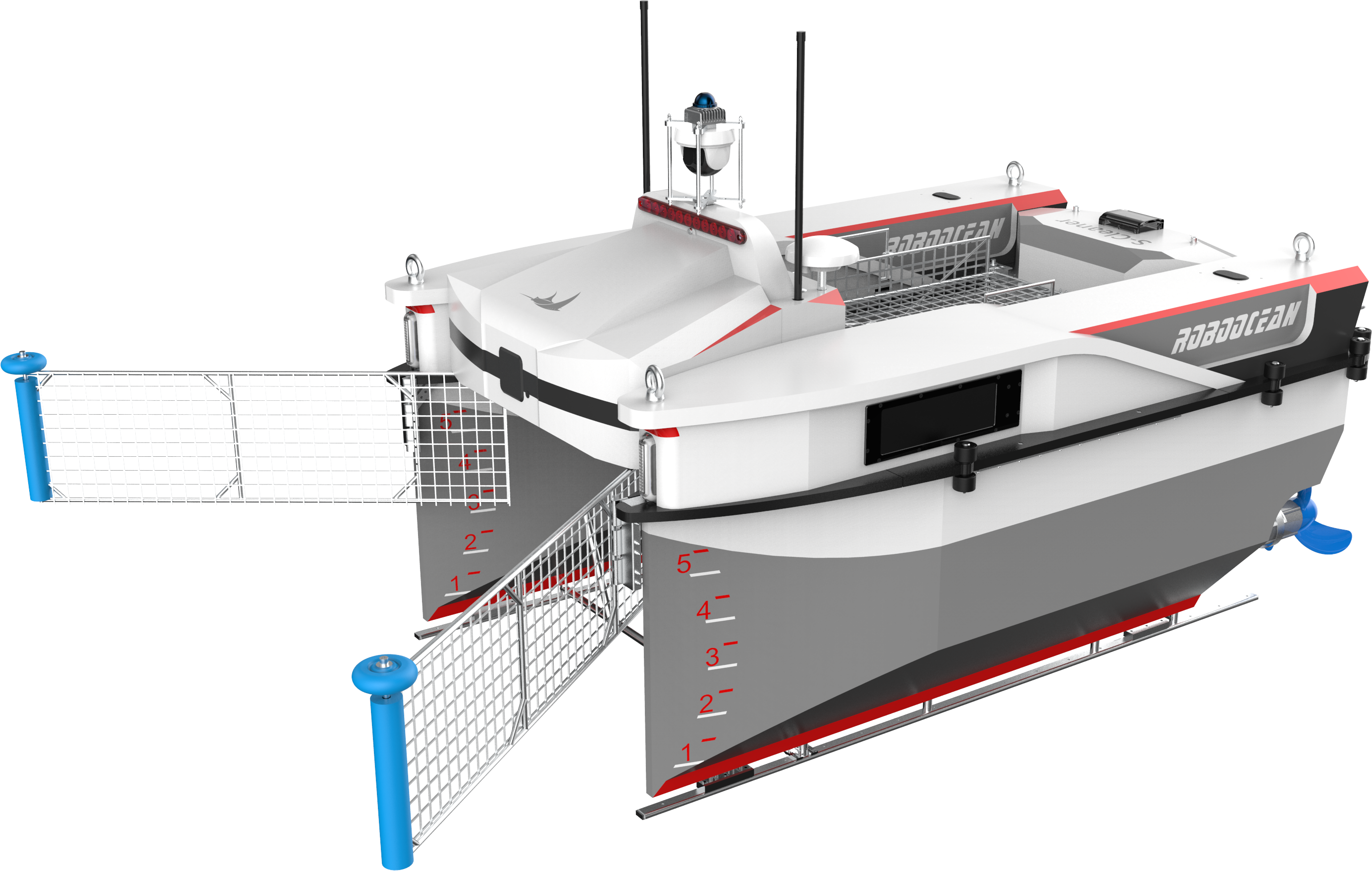
近年来,使用水下机器人进行检测已成为主流。然而,以往市场上现有的水下机器人只能满足短距离的检测要求,在长距离隧洞进行检测会产生线缆缠绕等安全问题。此次研发的水下机器人系统检测距离长达5.5千米,属国内首次。

主要成果
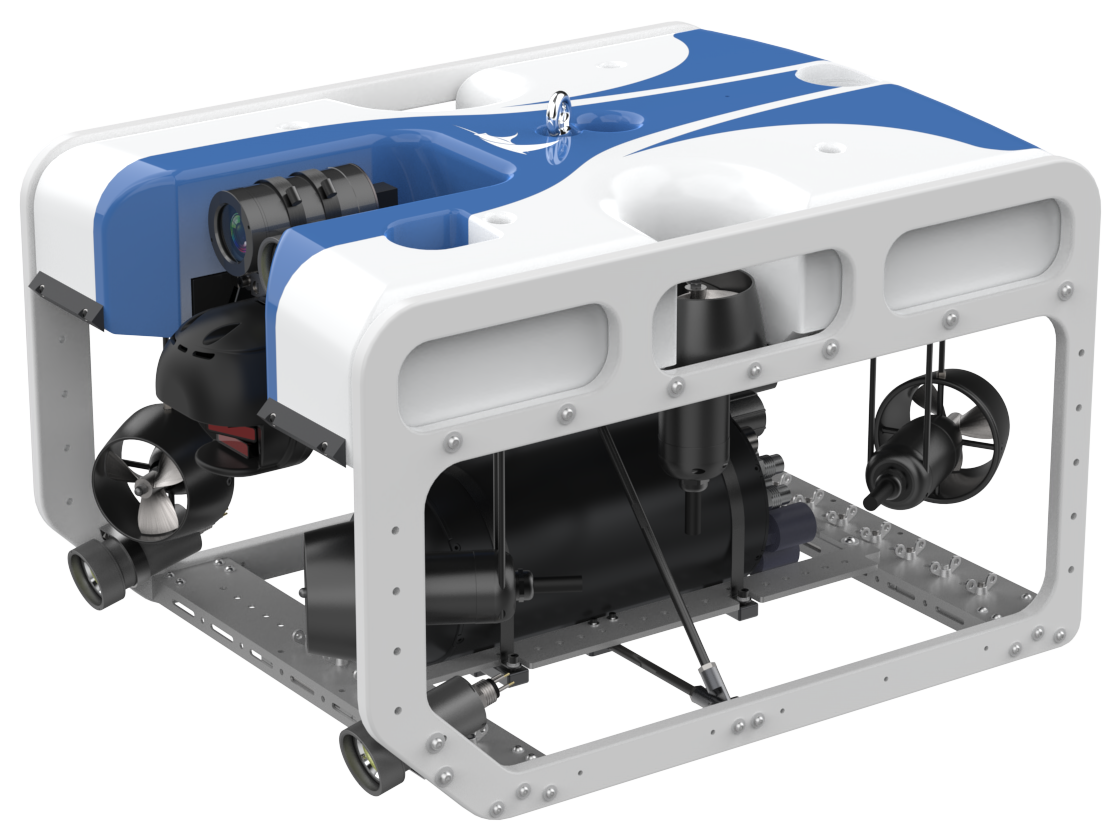
该项目始于2020年,从筹备到最终研制成功历时三年。在这期间,项目突破了多项技术难点,包括超长距离小直径零浮力脐带缆系统的研制、水下有限空间内超高电压转换、大型机器人360°全姿态运动控制、多传感器融合的复杂电控系统设计、路径规划与智能避障功能设计等。
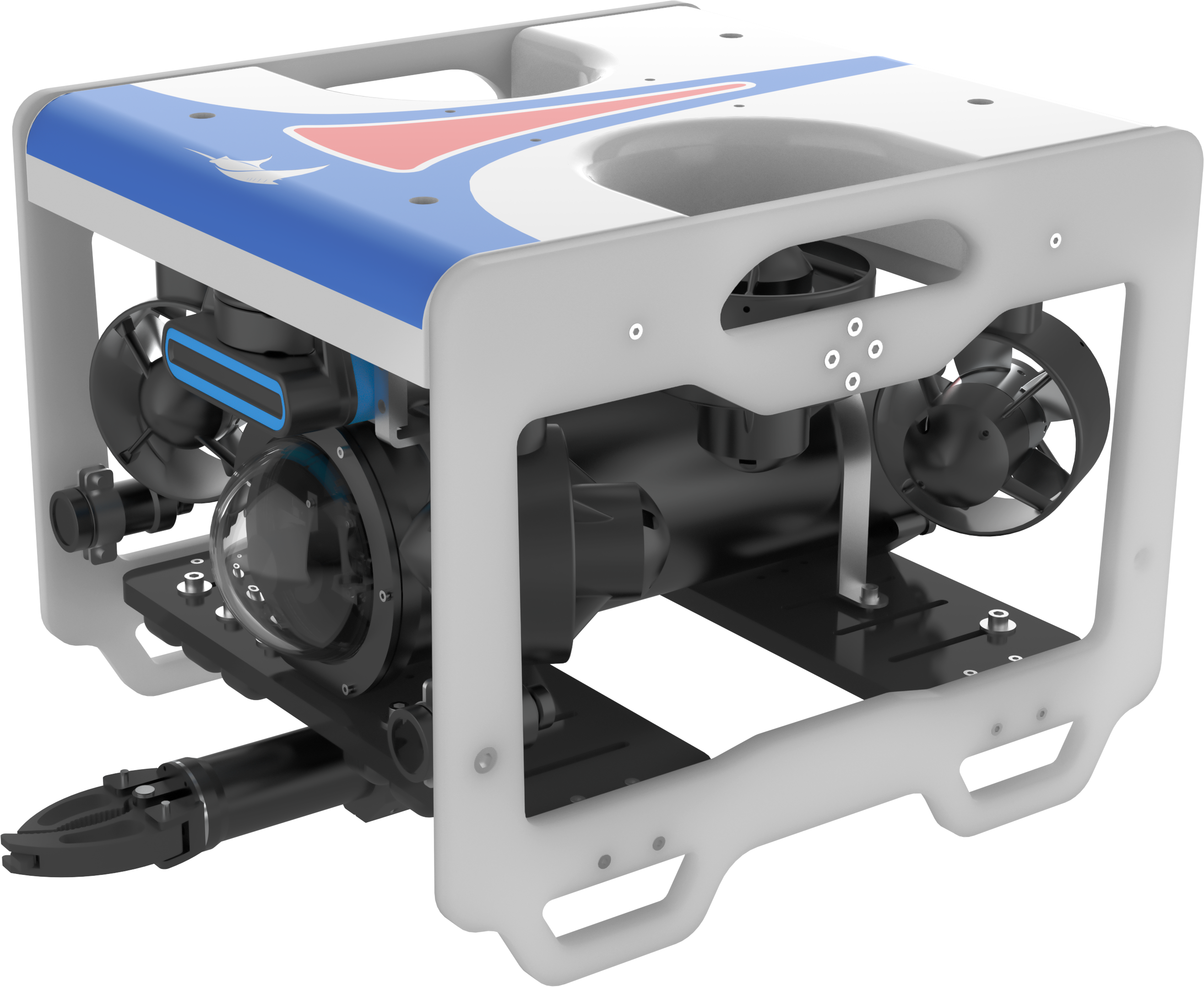
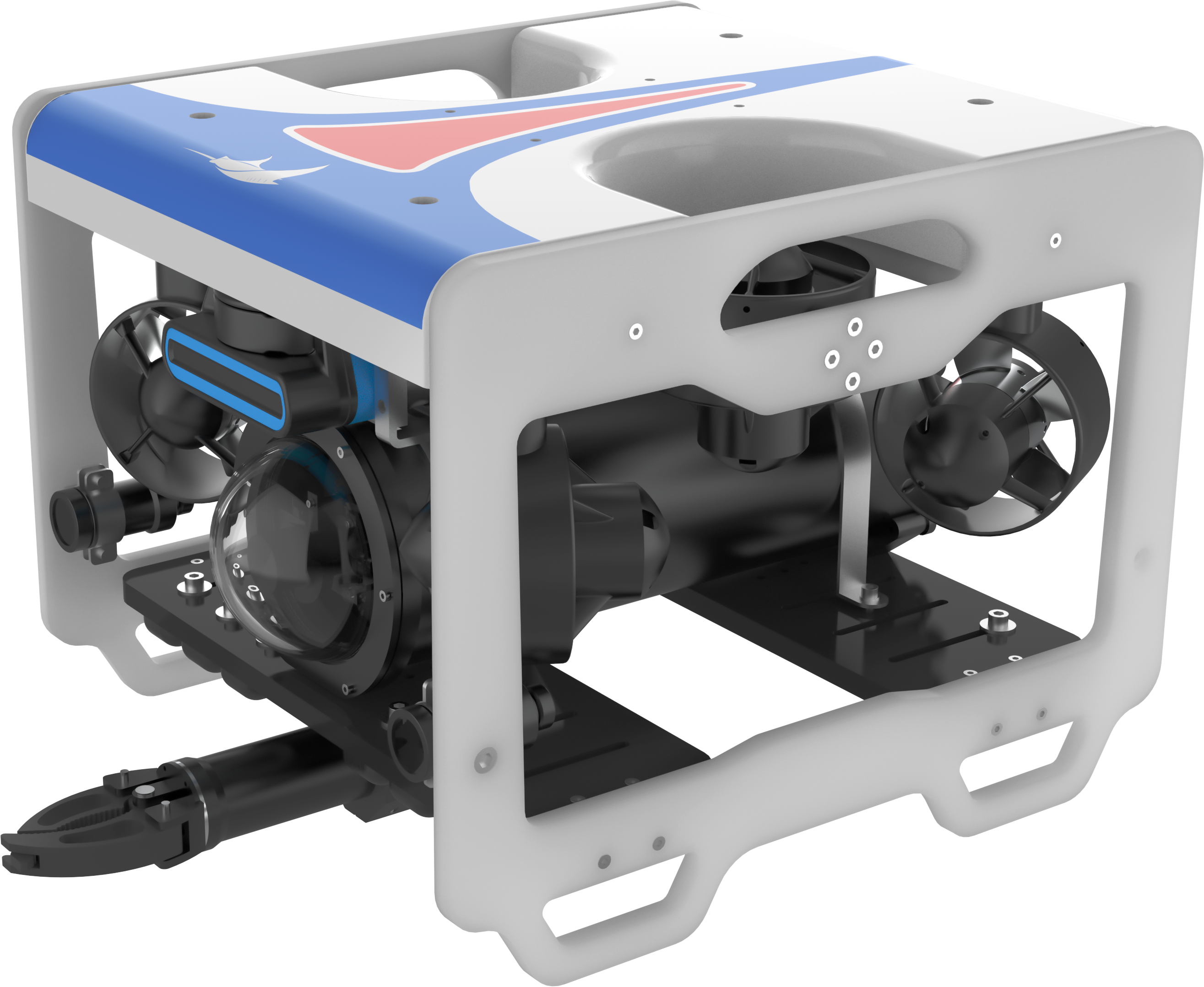
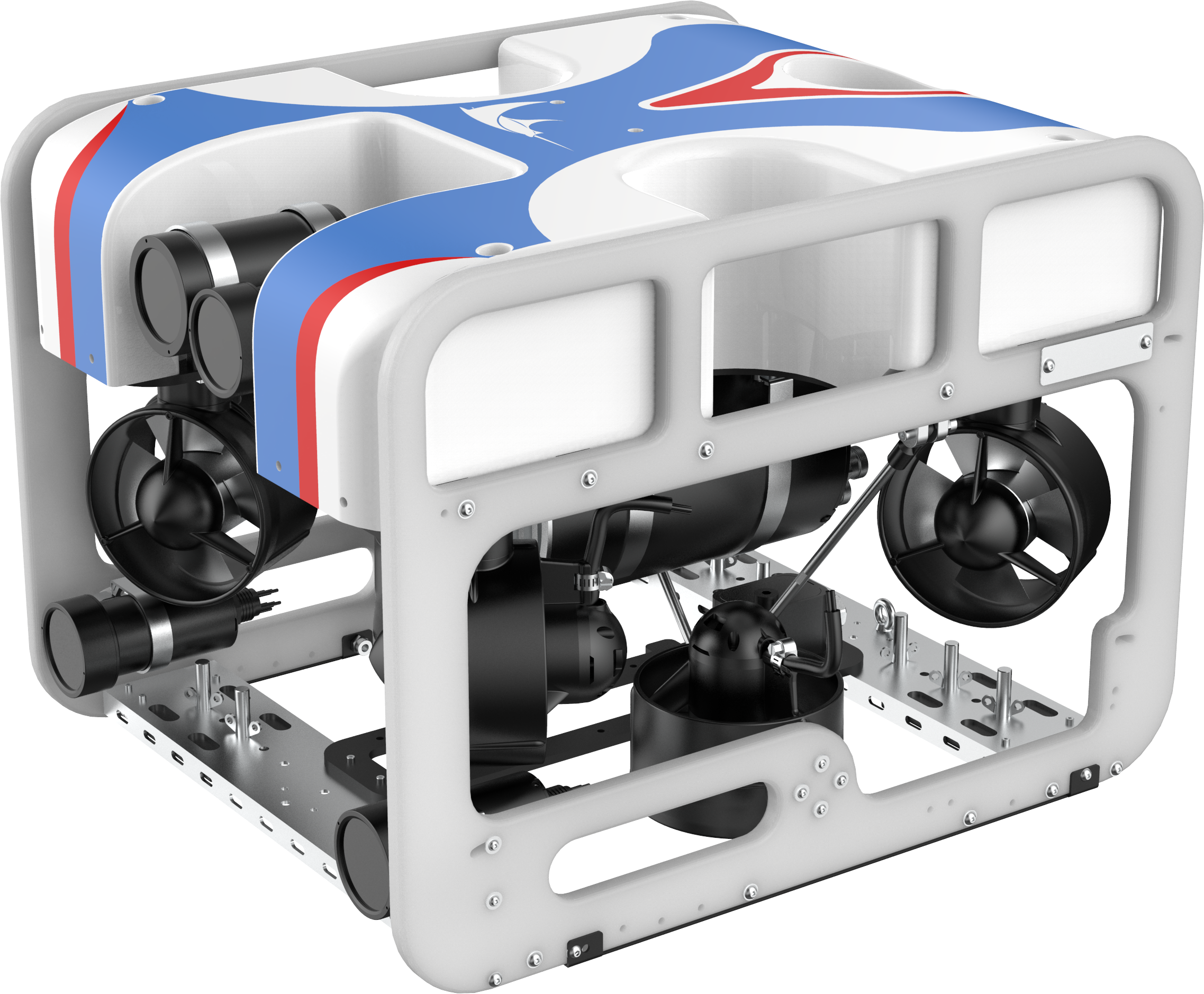
项目显著的创新成果包括机器人水下360°全姿态控制保持功能、机器人抗水流扰动外形结构设计以及隧洞应急自主脱缆寻迹返航技术等。
360°全姿态运动
该项目不仅从科学角度解决了多项技术难题,同时也维护了水电站的科学安全运行。它填补了市场上的空缺,并以高适应性、高效性、准确性和低成本的优势满足了各类检修需求,创造了不可忽视的社会效益和经济效益。
在验收会上,南方电网公司的专家、高校教授和行业专家组成的专家组高度评价了该项目成果。他们认为,该项目充分考虑了检测作业需求和用户体验,不仅克服了较大的研发难度,还兼顾了创新性和实用性。此次项目计划任务圆满完成。
今后我们将持续发挥公司技术优势,在水下科技领域不断航行,为社会创造更多社会价值。
联系我们



