


































前言
水工隧洞在水利工程中发挥着重要的作用,特别是在水电站中。截至 2015 年,我国水电站水工隧洞累计长超过 10000 千米。
近年来,国内水工隧洞建设正在向长距离、大埋深的方向发展,这给建造和运行都带来了许多挑战,包括地质条件复杂施工难度大、所在位置隐蔽不易检测、运行条件差等。这些因素可能导致水工隧洞在运行阶段出现各种病害,如渗漏、裂缝等。因此,对水工隧洞进行定期的检测和维护是非常重要的。

■ 建造中的输水隧洞
现有检测方式
传统的水工隧洞检测方式主要是人工检测。然而,这种方法存在诸多问题。首先,人工检测速度慢,效率低。其次,由于水下环境复杂,检测的准确性和精度难以保证。此外,人工检测还存在危险性,尤其是在深水或复杂的水下环境中。
为了克服传统检测方式的局限性,许多管理单位开始使用水下机器人进行水工隧洞的检测。这种技术让长距离的水工隧洞病害排查变得更加科学和高效。水下机器人可以精确、快速地收集数据,并可以在隧洞运行状态下进行检测,大大提高了检测的精度和效率。
服务案例
2023 年年初,北京某儿童福利院门前绿地发现冒水现象。经过取水检测硝酸盐和硫酸盐指标后,初步认定冒水原因与附近一个输水隧洞漏水有关。由于隧洞正在运行中,无法进行停水检测。相关单位在漏点处采取了引流措施,避免了冒水对周边环境和人员通行的影响。
在水厂例行停水检测期间,地面冒水现象停止,这进一步证实了隧洞漏水是导致冒水的原因。为了全面了解隧洞的状况,业主单位联系了博雅工道,并决定在隧洞运行期间使用水下机器人进行检测。

■ 检测范围示意
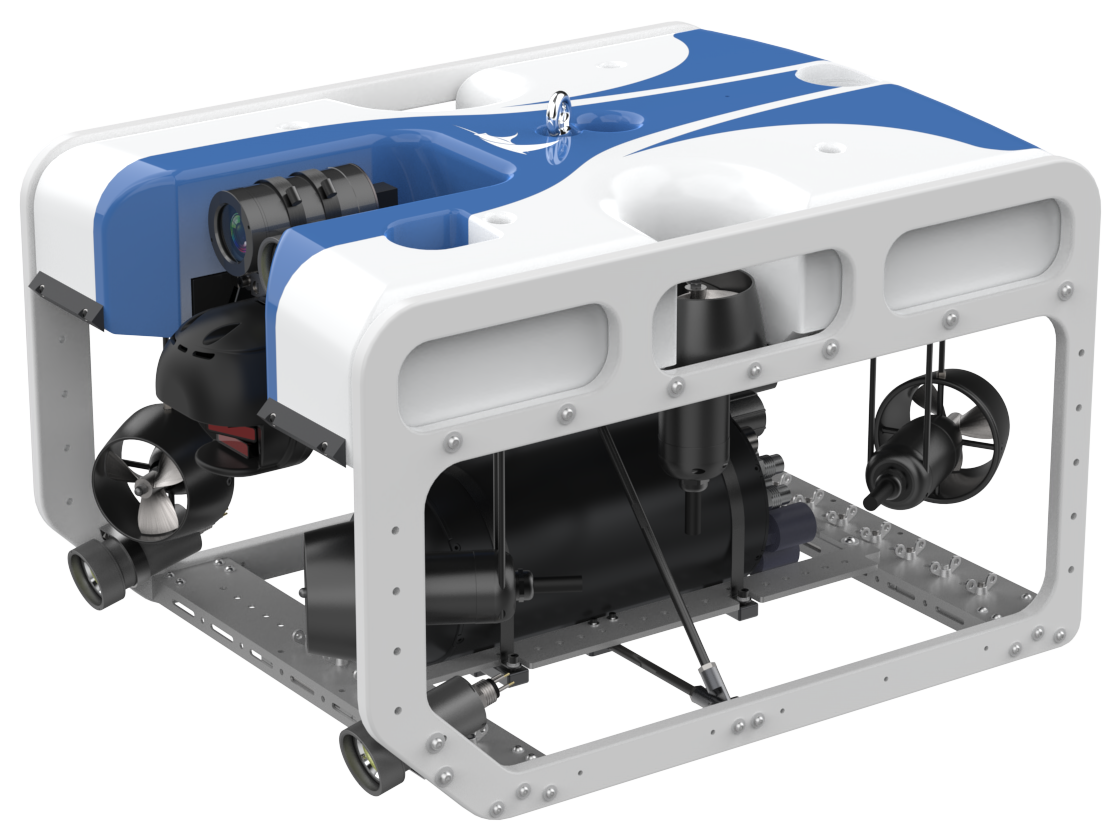
2023 年 5 月 31 日—6 月 1 日,我单位派出 4 人完成了 3 个台班的检测作业。本次作业使用 R-20 搭载水下高清摄像头、前视多波束声呐、管道声呐和激光测距仪。
检测人员使用 R-20 根据现有地表渗水点位置,对排气阀井上下游约 400 米范围管段进行全覆盖扫描,主要检测隧洞渗水点附近伸缩缝,对重点关注部位和异常部位进行进一步抵进直观检查和激光测距仪扫描。

■ 光学图像
检测结果显示,检测管段排气阀井上游洞身顶部存在多处滴水较严重渗漏情况,部分环缝伸缩缝填料脱落流失,同时还发现了涵洞洞身周围存在较大脱落缺陷及毛细缝。
除去结构性病害,检测人员还针对底部淤积层和杂物堆积、洞室上方水面团状杂物漂浮等做出分析报告,针对上述问题,管理方已经制定了检修和后期运维监管的方案,确保输水隧洞的安全正常运行。

■ 激光测距仪图像
利用水下机器人进行水工隧洞检测已经成为一种高效、精确的方法。它可以快速获取数据并识别潜在问题,提高检测的效率和精度。此外,这种技术还可以降低人工检测的危险性,特别是在深水和复杂的水下环境中。通过案例可以看出,即使在水工隧洞处于状态下,水下机器人也可以进行精准的检修和运维监管。
随着水下机器人技术的不断发展,我们相信,这一技术将在水工隧洞和其他水利工程中发挥更大的作用,为保障水利工程的安全运行做出更大的贡献。
联系我们



